Вступ до систем керування: робота, типи та застосування
Ви використовуєте системи керування щоразу, коли машина автоматично підтримує стабільне значення, наприклад температуру, швидкість або рівень.У цій статті пояснюється, що таке система керування, як її частини працюють разом і як зворотний зв’язок забезпечує правильний результат.Ви також побачите основні типи систем і їх поведінку під час роботи.Включено загальні способи використання, переваги та обмеження.Каталог
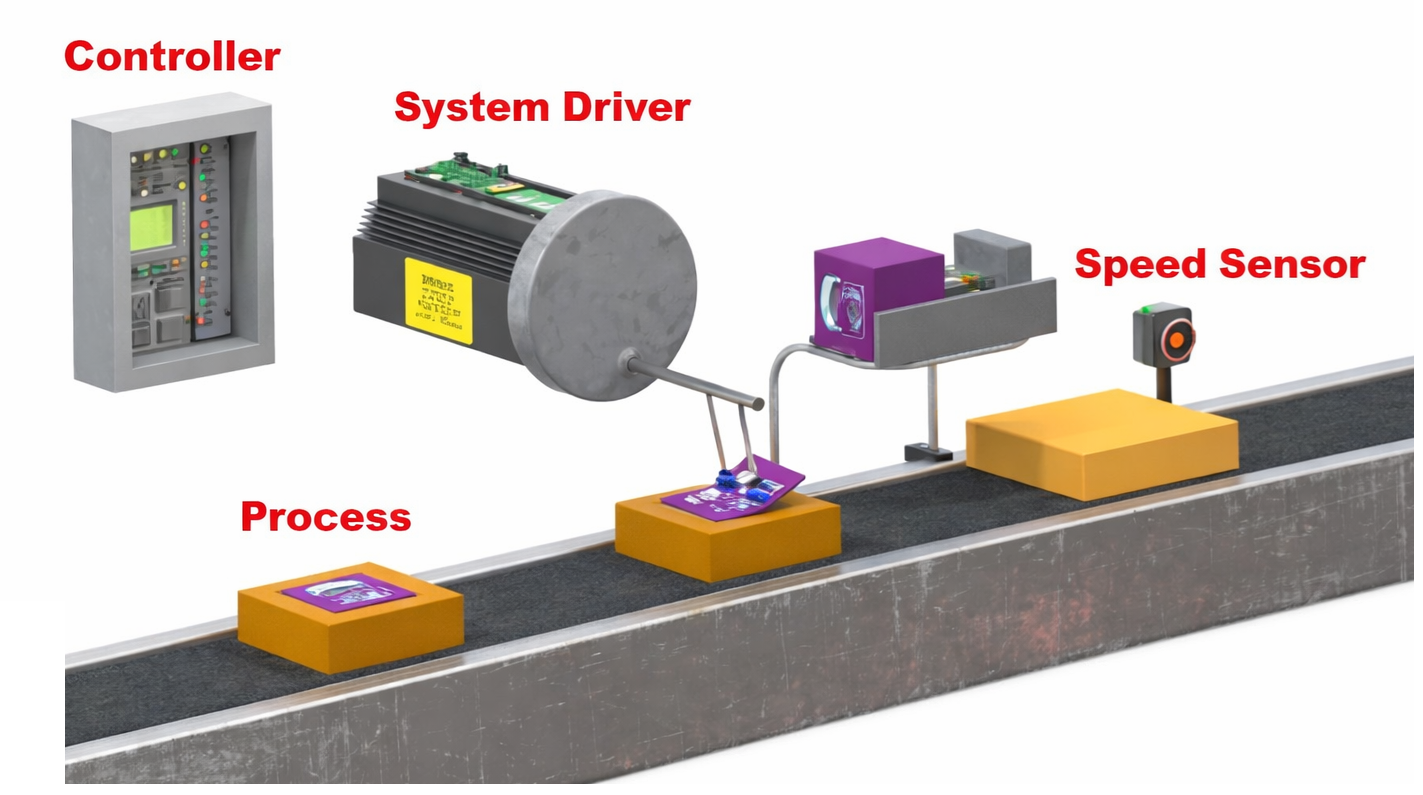
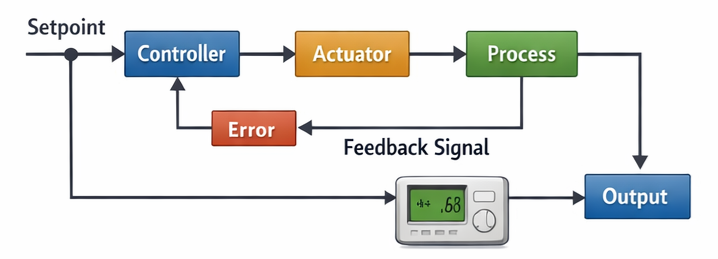
Рисунок 1. Приклад системи керування
Що таке система контролю?
Система керування — це система, яка підтримує виміряне значення близько до бажаного цільового значення.Його призначення полягає в тому, щоб автоматично налаштувати процес, щоб результат залишався правильним, навіть коли умови змінюються.Наприклад, кімнатний термостат підтримує температуру близько заданого рівня, а автомобільний круїз-контроль підтримує обрану швидкість автомобіля.Контролер рівня води в резервуарі також підтримує висоту води на вибраній позначці.Простіше кажучи, система керування постійно перевіряє та коригує змінну, щоб вона відповідала необхідному значенню.
Основні елементи системи управління
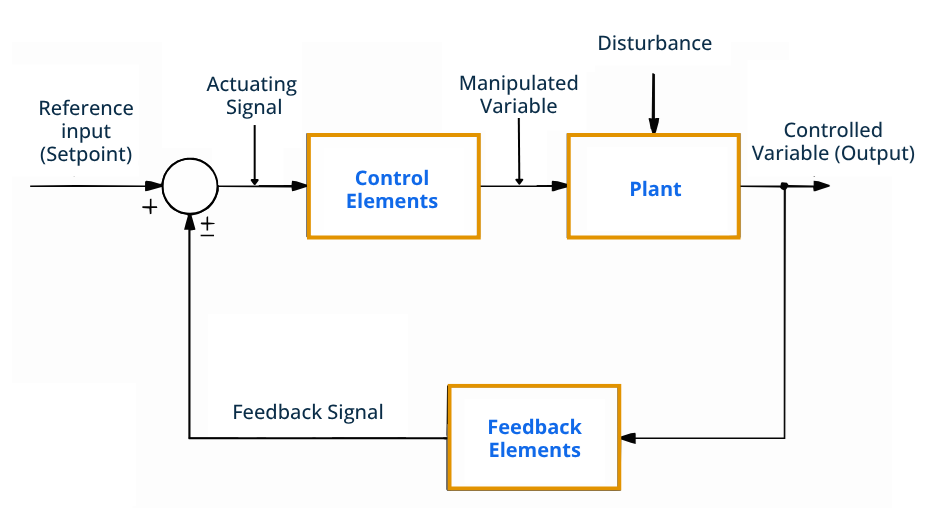
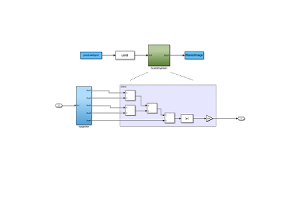
Рисунок 2. Блок-схема системи керування
Система керування складається з кількох стандартних частин, кожна з яких виконує певне завдання.
• Еталонний вхід (задане значення)
Це бажане значення, яке система намагається підтримувати.Він представляє вибрану цільову умову.Система завжди порівнює фактичне значення з цим посиланням.
• Спрацьовуючий сигнал
Це сигнал, отриманий після порівняння бажаних і фактичних значень.Він показує, скільки коригування необхідно.Сигнал готує систему до корекції.
• Елементи управління
Ці частини керують процесом прийняття рішень.Вони визначають коригувальну дію на основі отриманого сигналу.Результат цього етапу готує процес до коригування.
• Керована змінна
Це регульована кількість, що надсилається на процес.Зміна цього значення впливає на кінцевий результат.Це змінна, яку система може безпосередньо змінювати.
• Завод
Завод – це процес, яким керують.Він створює кінцеве вихідне значення.Система прагне підтримувати цей вихід на бажаному рівні.
• Порушення
Це небажана зміна, яка впливає на процес.Це може відштовхнути вихід від бажаного значення.Система має це компенсувати.
• Контрольована змінна (вихід)
Це фактично виміряний результат процесу.Він показує поточний стан системи.Мета полягає в тому, щоб він був рівним еталонному введенню.
• Елементи зворотного зв'язку
Вони вимірюють результат і надсилають інформацію для перевірки.Вони забезпечують поточний стан системи.Це дозволяє визначити корекцію.
• Сигнал зворотного зв'язку
Це повернена інформація про вихідне значення.Він представляє умову процесу.Система використовує його для порівняння.
Принцип роботи системи керування
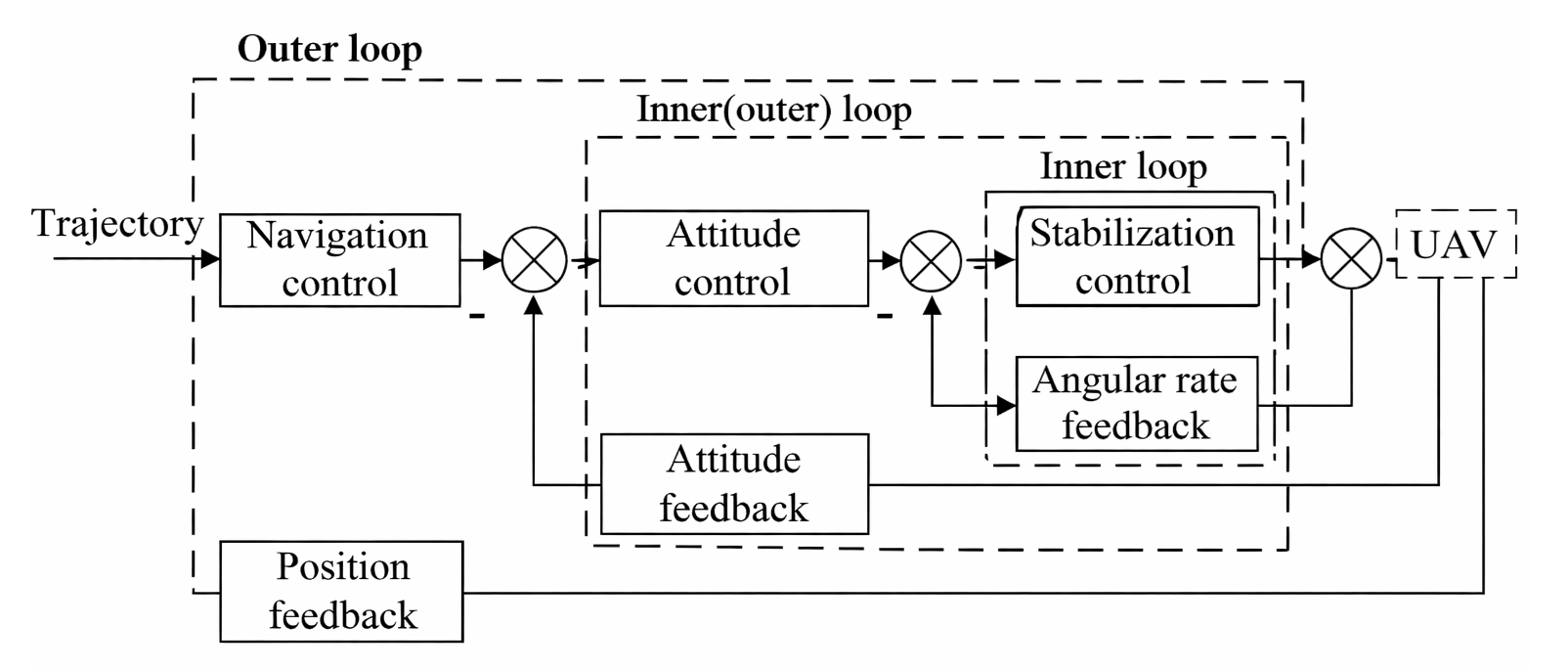
Рисунок 3. Принцип роботи системи керування
Принцип роботи системи керування починається з того, що системі надається бажане вхідне значення.Потім система порівнює це значення з фактичним вихідним значенням.Різниця між ними називається сигналом помилки.Якщо помилка існує, система генерує сигнал корекції.Ця корекція коригує процес, щоб зменшити помилку.Вихід змінюється та постійно перевіряється знову.Цикл повторюється до тих пір, поки результат точно не збігається з бажаним значенням.
Характеристики систем управління
Системи керування оцінюються на основі того, наскільки добре вони працюють під час роботи.Ці характеристики описують якість і надійність реакції системи.
|
характеристики |
опис |
|
Стабільність |
Вихід робить
не розходяться;повертається до постійного значення після збурення |
|
Точність |
Остаточна помилка ≤
±2–5% заданого значення |
|
Точність |
Вихід
варіація ≤ ±1% при тому самому вході |
|
Час відгуку
|
Початковий
реакція відбувається протягом виміряного часу затримки (td) |
|
Час підйому |
Час від 10%
до 90% кінцевої вартості |
|
Час встановлення |
Входить і
залишається в межах діапазону ±2%. |
|
Перевищення |
Пік перевищує
остаточне значення на % суми |
|
Стаціонарний стан
Помилка |
Постійний
зсув, що залишився після стабілізації |
|
Чутливість |
ΔВихід /
ΔКоефіцієнт зміни параметра |
|
Міцність |
Підтримує
роботу, незважаючи на зміну завад |
|
Пропускна здатність |
Діє
ефективно до частоти зрізу -3 дБ |
|
Повторюваність |
Той самий вхід
дає однаковий результат у межах допуску |
|
Надійність |
Діє
без збоїв протягом номінального часу роботи (MTBF) |
|
Демпфування |
коливання
розпад визначається коефіцієнтом затухання ζ |
|
Швидкість
Відповідь |
Загальний час до
досягти стабільного стану |
Типи систем управління
Системи керування класифікуються на основі того, як вони обробляють інформацію, сигнали та поведінку у відповідь.Вони згруповані відповідно до використання зворотного зв’язку, форми сигналу та математичної поведінки.
Система керування з відкритим контуром
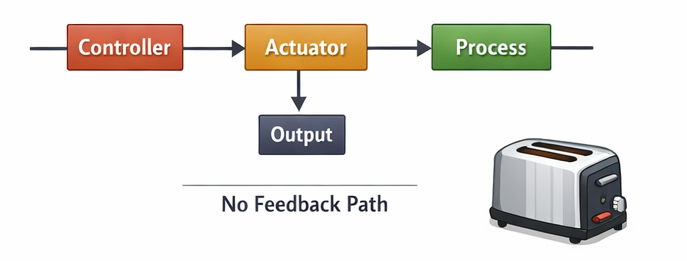
Малюнок 4. Схема системи керування з відкритим контуром
Система керування з розімкнутим контуром — це система, де вихід не впливає на дію керування.Система надсилає команду та вважає результат правильним, не перевіряючи його.Оскільки немає шляху зворотного зв’язку, він не може автоматично виправляти помилки чи порушення.Продуктивність залежить головним чином від правильного калібрування та умов експлуатації.Ці системи прості, недорогі та прості в проектуванні.Однак зміни навантаження або середовища можуть вплинути на кінцевий результат.Загальні приклади включають таймер електричного тостера, таймер керування пральною машиною та фіксований таймер поливу.
Система керування замкнутим циклом
Малюнок 5. Схема системи керування із замкнутим контуром
Система керування із замкнутим контуром — це система, яка використовує зворотний зв’язок для автоматичного регулювання вихідного сигналу.Система вимірює результат і порівнює його з бажаним значенням.Якщо з’являється різниця, застосовується корекція, щоб зменшити помилку.Це безперервне регулювання забезпечує точну та стабільну роботу навіть за змінних умов.Системи із замкнутим циклом забезпечують кращу точність і надійність, ніж системи з відкритим контуром.Вони широко використовуються в сучасних системах автоматичного керування.Типовими прикладами є контроль температури кондиціонера, круїз-контроль автомобіля та автоматичні регулятори напруги.
Система безперервного керування
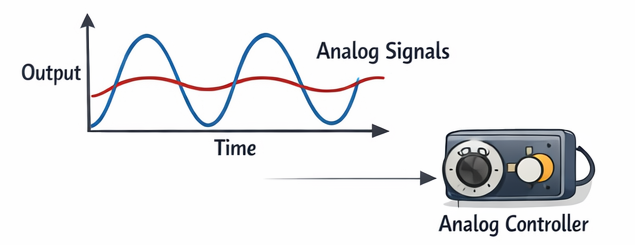
Малюнок 6. Безперервний (аналоговий) керуючий сигнал
Система безперервного керування обробляє сигнали, які плавно змінюються з часом.Вхід і вихід існують у кожну мить без перерви.Ці системи зазвичай працюють з аналоговими електричними або механічними сигналами.Оскільки сигнали безперервні, відповідь також плавна та природна.Системи безперервного часу зазвичай зустрічаються в традиційних аналогових контролерах.Вони підходять для фізичних процесів, що вимагають негайної реакції.Приклади включають аналогові регулятори швидкості, регулювання гучності аудіопідсилювача та керування положенням гідравлічного клапана.
Дискретна система керування

Малюнок 7. Дискретний (цифровий) керуючий сигнал
Система керування дискретним часом працює з використанням дискретизованих сигналів даних.Система перевіряє та оновлює значення лише через певні проміжки часу.Ці сигнали зазвичай обробляються цифровими контролерами або мікропроцесорами.Вихід змінюється крок за кроком, а не постійно.Такі системи допускають програмовану роботу та гнучке налаштування.Вони широко використовуються в сучасному електронному та комп'ютерному управлінні.Приклади включають керування температурою на основі мікроконтролерів, цифрове керування швидкістю двигуна та термостати розумного будинку.
Лінійна система керування
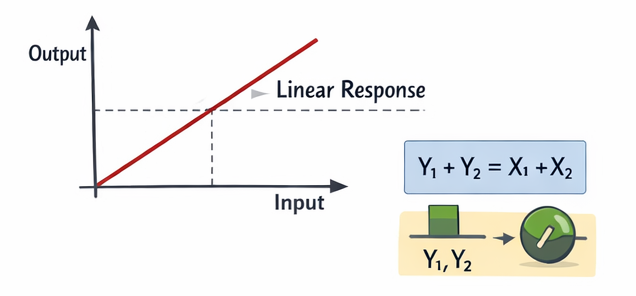
Малюнок 8. Взаємозв’язок вводу-виводу лінійної системи
Лінійна система керування дотримується пропорційного співвідношення між входом і виходом.Якщо вхід подвоюється, вихід також подвоюється за тих же умов.Ці системи задовольняють принцип суперпозиції, коли комбіновані входи дають комбіновані виходи.Лінійна поведінка забезпечує передбачуваний і простий математичний аналіз.Більшість теоретичних проектів керування передбачає лінійну роботу для простоти.Лінійні моделі допомагають проектувати стабільні та точні системи.Приклади включають електронні підсилювачі малого сигналу та області керування двигуном із низьким навантаженням.
Нелінійна система керування
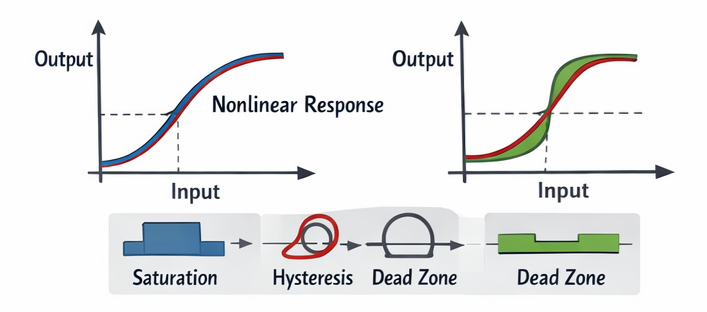
Рисунок 9. Характеристики відгуку нелінійної системи
Нелінійна система керування має вихід, який не пропорційний входу.Реакція змінюється залежно від робочого діапазону або умов.Невеликі зміни вхідних даних можуть призвести до великих варіацій вихідних даних або взагалі не призвести до змін.Часто з'являються такі ефекти, як насичення, гістерезис і мертві зони.Ці системи важче проаналізувати, але вони точніше представляють фізичні процеси.Багато систем природно поводяться нелінійно.Приклади включають обмеження руху роботизованої руки, поведінку магнітного приводу та керування потоком клапана в крайніх положеннях.
Переваги та недоліки систем керування
Системи керування покращують послідовність і зменшують ручні зусилля, але також створюють складність і вартість.
Переваги систем управління
• Під час роботи система підтримує вихідну потужність близькою до необхідного.
• Операторам не потрібно постійно регулювати обладнання вручну.
• Машини можуть працювати довгі години без частих зупинок.
• Система автоматично коригує зміни умов.
• Статус роботи можна перевірити з панелі або віддаленого дисплея.
Недоліки систем управління
• Вартість налаштування вища, ніж у простих ручних систем.
• Для налагодження та обслуговування потрібні кваліфіковані працівники.
• Датчики та електронні частини можуть з часом вийти з ладу.
• Пошук причини проблем може зайняти більше часу.
• Система залежить від стабільного електропостачання.
Застосування систем управління
Системи керування використовуються як у промисловій автоматизації, так і в повсякденному обладнанні для автоматичної підтримки належної роботи.
1. Промислове виробництво
Виробничі машини підтримують постійні розміри та якість продукції.Автоматизовані складальні лінії використовують регулювання для забезпечення повторюваності.Це зменшує відходи та підвищує ефективність.
2. Регулювання температури
Опалювальне та охолоджувальне обладнання підтримує комфортні умови навколишнього середовища.Будівлі покладаються на автоматичне регулювання для стабілізації внутрішнього клімату.Це підвищує енергоефективність і комфорт.
3. Транспортні системи
Транспортні засоби використовують контроль швидкості та стабільності для більш плавної роботи.Сучасні автомобілі оснащені системами круїз-контролю та тяги.Це покращує безпеку водіння та продуктивність.
4. Енергетичні системи
Електричні мережі регулюють рівні напруги та частоти.Генератори регулюють потужність відповідно до навантаження.Це забезпечує стабільне електропостачання.
5. Робототехніка та автоматизація
Роботи виконують точні завдання позиціонування та руху.Автоматизовані машини працюють безперервно з високою точністю.Це дозволяє передове виробництво.
6. Медичне обладнання
Прилади підтримують контрольовані умови роботи під час лікування.Контрольне обладнання зберігає значення в безпечних межах.Це підвищує безпеку та надійність пацієнтів.
7. Побутова техніка
Щоденні пристрої автоматично керують налаштуваннями роботи.Пральні машини та холодильники підтримують належні умови експлуатації.Це спрощує щоденні завдання.
8. Аерокосмічні системи
Літаки та дрони підтримують стабільні умови польоту.Автоматичне наведення підтримує правильну орієнтацію та висоту.Це забезпечує надійну навігацію.
Система управління проти автоматизації проти вбудованих систем
Ці технології тісно пов’язані, але служать різним інженерним цілям у сучасних електронних і промислових продуктах.
|
Особливість |
контроль
система |
автоматизація |
Вбудований
система |
|
Основний фокус |
Регулювання
змінні |
процес
виконання |
пристрій
операція |
|
призначення |
Підтримувати
бажане значення |
Виконувати завдання
автоматично |
Біг присвячений
функції |
|
Область застосування |
Специфічний
поведінка процесу |
Цілий
робочий процес
|
неодружений
пристрій продукту |
|
Рішення
Можливість |
На основі
вимірювані значення |
На основі
запрограмована логіка |
На основі
прошивка |
|
Використання зворотного зв'язку |
часто
потрібно |
Додатково |
Додатково |
|
Тип обладнання |
Датчики і
приводи |
Машини і
контролери |
мікроконтролер
дошка |
|
Роль програмного забезпечення |
Розрахунок
і виправлення |
Секвенування
та координація |
пристрій
логіка управління |
|
Тип відповіді |
Безперервний
коригування |
завдання
виконання |
Функціональна експлуатація |
|
Розмір системи |
Малий до
середній |
Середній до
великий |
Дуже маленький |
|
Гнучкість |
Помірний |
Високий |
Обмежений |
|
час
Вимога |
Високий |
Помірний |
Високий |
|
застосування
Рівень |
Рівень процесу |
Рівень заводу |
Продуктовий рівень |
|
приклад |
температура
контроль |
Фабрика
виробнича лінія |
Розумний годинник |
|
Інтеграція |
Частина
автоматизація |
Містить
системи управління |
Підтримує обидва |
Висновок
Системи керування підтримують стабільність шляхом постійного порівняння фактичної продукції з цільовим значенням і виправлення будь-яких помилок.Їх продуктивність залежить від основних елементів, таких як зворотний зв’язок, дії контролера та керований процес.Різні класифікації визначають, як обробляються сигнали та наскільки точно система реагує на перешкоди.Завдяки цим можливостям системи керування широко застосовуються в промисловості, транспорті, енергетиці, медичному обладнанні та побутовому обладнанні.
Про нас
ALLELCO LIMITED
Дізнайтеся більше
Швидкий запит
Будь ласка, надішліть запит, ми відповімо негайно.
Питання що часто задаються [FAQ]
1. Чим контролер відрізняється від системи керування?
Контролер є лише пристроєм для прийняття рішень (наприклад, ПЛК або ПІД-регулятор).Система керування включає контролер плюс датчики, виконавчі механізми та процес, що регулюється.
2. Що таке ПІД-регулювання і чому воно важливо?
ПІД-регулювання використовує пропорційні, інтегральні та похідні дії для швидкої та плавної мінімізації помилок.Це покращує стабільність, точність і швидкість відгуку в більшості промислових систем.
3. Чому системи керування іноді коливаються або перестають змінюватись?
Коливання виникають, коли виправлення надто агресивні або запізнілі.Погане налаштування, повільні датчики або надмірне посилення призводять до неодноразового перевищення вихідного сигналу.
4. Що таке насичення приводу?
Насичення актуатора відбувається, коли актуатор досягає свого фізичного ліміту і не може далі збільшувати вихід.Це не дозволяє системі виправляти великі помилки.
5. Як системи управління справляються із затримками процесів?
Вони використовують методи налаштування, фільтри або прогнозні алгоритми, щоб компенсувати затримку, щоб виправлення відбувалося в потрібний час.

Посібник щодо резистора 4,7 кОм: колірний код, використання, тестування та порівняння значень
на 2026/02/16
Мініатюрний автоматичний вимикач (MCB): принцип роботи, типи, параметри та посібник з вибору
на 2026/02/15
Популярні публікації
-

Складні комп'ютери набору інструкцій: як вони змінили обчислення?
на 8000/04/18 147760
-

USB-C Pinout та функції
на 2000/04/18 111969
-
Використання xilinx Unified Dimulation Primitives: Вичерпне посібник з дизайну та моделювання FPGA
на 1600/04/18 111351
-
Напруга джерела живлення в електроніці: значення VCC, VDD, VEE, VSS і GND
на 0400/04/18 83734
-

Посібник з роз'єму RJ45: Покін, проводка, типи кабелів та використання
на 1970/01/1 79523
-
Кінцевий посібник з дротяних кольорових кодів у сучасних електричних системах
Те, як наші електричні системи використовують кольори, - це не лише зовнішній вигляд.Кожен колір дроту тепер вказує на певну функцію, що полегшує ідентифікацію та обробку електричних компонентів пр...на 1970/01/1 66932
-

Посібник з очищення клапана: функція, симптоми, тестування та заміна для оптимальних показників двигуна
Клапан Purege є ключовою частиною системи автомобіля, яка допомагає підтримувати повітря в чистоті, керуючи пари палива, перш ніж вони зможуть втекти в атмосферу.Це не тільки допомагає навколишньом...на 1970/01/1 63084
-
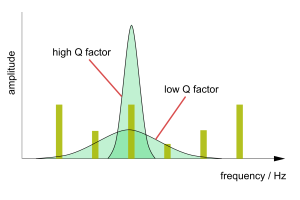
Якість (Q) Фактор: рівняння та додатки
Коефіцієнт якості, або "Q", важливий при перевірці того, наскільки добре індуктори та резонатори працюють в електронних системах, які використовують радіочастоти (RF)."Q" вимірює, наскільки добре л...на 1970/01/1 63025
-
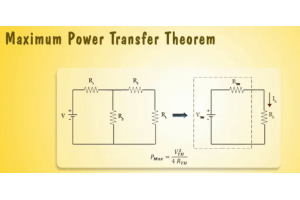
Досягнення пікових показників з максимальною теоремою передачі потужності
Максимальна теорема передачі потужності пояснює, як енергія від джерела, наприклад акумулятора або генератора, переходить до підключеного навантаження.Він показує точну умову, коли навантаження отр...на 1970/01/1 54090
-

Технічні характеристики акумулятора A23 та сумісність
Акумулятор A23-це невеликий акумулятор у формі циліндра з високою напругою.Також називається 23A, 23AE або MN21, він працює на 12 вольт і набагато вище, ніж батареї AA або AAA.Його спеціал...на 1970/01/1 52163
Номер гарячої частини
-

AOT2500L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 150V 11.5/152A TO220
DS80C320-QCG+
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT ROMLESS 44PLCC
DF30FB-40DS-0.4V(81)
Hirose Electric Co Ltd
CONN RCPT 40POS SMD GOLD
A1322LUA-T
Allegro MicroSystems
SENSOR HALL EFFECT ANALOG 3SIP
767163392GPTR13
CTS Resistor Products
RES ARRAY 8 RES 3.9K OHM 16SOIC
LV8404T-TLM-E
onsemi
IC MOTOR DRIVER
PIC18F2321-E/SS
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SSOP
ABMM2-7.3728MHZ-E2-T
Abracon Corporation
CRYSTAL 7.3728MHZ 18PF SMD
SK36SMA
Diotec Semiconductor
SCHOTTKY SMA 60V 3A
BR93L56FV-WE2
Rohm Semiconductor
IC EEPROM 2KBIT SPI 2MHZ 8SSOPB
TMP36GSZ-REEL7
Analog Devices Inc.
SENSOR ANALOG -40C-125C 8SOIC
MAX6350MJA
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.02% 8CERDIP
FDP15N40
onsemi
MOSFET N-CH 400V 15A TO220-3
LM340K-5.0
Texas Instruments
IC REG LINEAR 5V 1.5A TO3-2
MOC3162TM
Fairchild Semiconductor
TRIAC OUTPUT OPTOCOUPLER
ATH10K12-9SJL
Artesyn Embedded Power
DC DC CONVERTER 1.2-5.5V 55W
AD7684BRMZRL7
Analog Devices Inc.
IC ADC 16BIT SAR 8MSOP
350561-1
TE Connectivity AMP Connectors
CONN PIN 18-24AWG CRIMP TIN -

2N3054
Microchip Technology
POWER BJT
AD7863ARZ-10
Analog Devices Inc.
IC ADC 14BIT SAR 28SOIC
TPS38B752933DSKR
Texas Instruments
65-V DUAL-CHANNEL SUPERVISOR WIT
MT8889CS1
Microchip Technology
IC TELECOM INTERFACE 20SOIC
SIP2800DY-T1-E3
Vishay Siliconix
IC REG CTRLR MULT TOPOLOGY 8SOIC
0451.125MR
Littelfuse Inc.
FUSE BOARD MNT 125MA 125VAC/VDC
NCV20091SN2T1G
onsemi
IC OPAMP GP 1 CIRCUIT 5TSOP
PIC16LF876-04/SO
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SOIC
08053C153JAT2A
KYOCERA AVX
CAP CER 0.015UF 25V X7R 0805
ST72F621L4M1
STMicroelectronics
IC MCU 8BIT 16KB FLASH 34SOIC
IRGP50B60PDPBF
International Rectifier
AUTOMOTIVE WARP2 IGBT ULTRAFAST
RT1206BRE07300KL
YAGEO
RES SMD 300K OHM 0.1% 1/4W 1206
ISL6560CB
Renesas Electronics America Inc
IC REG CTRLR BUCK 16SOIC
CL10B224KO8SFNC
Samsung Electro-Mechanics
CAP CER 0.22UF 16V X7R 0603
F1827HD600
Sensata-Crydom
MODULE SCR/DIODE 25A 240VAC
ICL3223ECA-T
Renesas Electronics America Inc
IC TRANSCEIVER FULL 2/2 20SSOP
TPS62800YKAR
Texas Instruments
IC REG BUCK ADJ/FIX 1A 6DSBGA
ITS4200SMENHUMA1
Infineon Technologies
IC PWR SWTCH N-CHAN 1:1 SOT223-4 -

MC1032P
Motorola
LOGIC CIRCUIT, ECL
UC2843AQDR
Texas Instruments
IC REG CTRLR MULT TOP 14SOIC
MSB22ML
Diodes Incorporated
LOW POWER BRIDGE MSB T&R 2.5K
RP110K301B-TR
Nisshinbo Micro Devices Inc.
IC REG LINEAR 3V 150MA DFN0808-4
GRM319R61A106KE19J
Murata Electronics
CAP CER 10UF 10V X5R 1206
GRM1555C2A8R7DA01J
Murata Electronics
CAP CER 8.7PF 100V C0G/NP0 0402
251R14S2R7BV4T
Johanson Technology
CAP CER 2.7PF 250V C0G/NP0 0603
LT1963EST-1.5#PBF
Analog Devices Inc.
IC REG LINEAR 1.5V 1.5A SOT223-3
TPS51225RUKT
Texas Instruments
IC REG QUAD BUCK/LNR SYNC 20WQFN
MCP23S18T-E/SO
Microchip Technology
IC XPNDR 10MHZ SPI 28SOIC
SY100ELT21LZC
Microchip Technology
IC TRANSLTR UNIDIRECTIONAL 8SOIC
MP8007GV-Z
Monolithic Power Systems Inc.
IC POE CNTRL 802.3AF 28QFN
STM6718TWWY6F
STMicroelectronics
IC SUPERVISOR 2 CHANNEL SOT23-5
F930J227KCC
KYOCERA AVX
CAP TANT 220UF 10% 6.3V 2312
PSMN016-100YS,115
Nexperia USA Inc.
MOSFET N-CH 100V 51A LFPAK56
AD8051AR-REEL
Analog Devices Inc.
IC OPAMP VF R-R LDIST LP 8SOIC
DRV8876NPWPR
Texas Instruments
IC MOTOR DRIVER DC 5.5V 16HTSSOP
SB2H100-E3/54
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 100V 2A DO204AC