MPU-6050 в дії: Практичний посібник з налаштування, конфігурації та управління шумом
Каталог
Вступ до MPU-6050
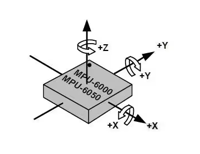
MPU-6050 -перший в світі інтегрований 6-осі-компонент обробки руху, який інтегрує 3-осі гіроскоп, 3-осі акселерометр та масштабований цифровий процесор руху (DMP).Мета його використання полягає в тому, щоб отримати кут нахилу об'єкта, який слід виміряти (наприклад, квадрокоптер, балансуючий автомобіль) на осях x, y та z, тобто кут кроку, кут рулону та кут позіхання.Ми прочитали шість даних MPU-6050 (тривісний значення AD прискорення та значення AD з трьома осі AD) через інтерфейс I2C.Після обробки синтезу постави можна обчислити кути кроку, кочення та поєднання.В якості спрямованого посилання для значень вимірювання визначення напрямку координат датчика є таким, як показано на малюнку нижче, що слідує за принципом правої системи координат (тобто правий палець вказує на позитивне напрямок X-Вісь, вказівний палець вказує на позитивний напрямок осі y, а середній палець вказує на позитивний напрямок осі Z).
Завдяки виділеній шині датчика I2C, MPU-6050 здатний отримувати вхід безпосередньо із зовнішнього 3-осі-компаса, забезпечуючи повний вихідний вихід MotionFusion ™.Це виключає проблему невідповідності між комбінованим гіроскопом та часовою шкалою прискорювача та значно зменшує простір упаковки порівняно з багатокомпонентними рішеннями.При підключенні до триосевого магнітометра, MPU-60x0 здатний забезпечити повний 9-осічний синтез руху до його основного порту I2C або SPI (зауважте, що порт SPI доступний лише на MPU-6000).
Альтернативи та еквіваленти
• MPU-3300
• MPU-6000
• MPU-6500
Виробник MPU-6050
Виробник MPU-6050-TDK.Після двох засновників TDK, доктора Йогоро Като та Такеї Теей, винайшов ферит у Токіо, вони заснували Токіо Денкікагаку Когьо К.К.У 1935 р. Як бренд глобальної електроніки, TDK завжди підтримував домінуюче положення в галузі електронної сировини та електронних компонентів.Комплексний та інноваційний портфель продуктів TDK охоплює пасивні компоненти, такі як керамічні конденсатори, алюмінієві електролітичні конденсатори, плівкові конденсатори, магнітні продукти, високочастотні компоненти, п'єзоелектричні та захисні пристрої, а також датчики та сенсорні системи (наприклад, температура та тиск,,Датчики магнітних та MEMS) тощо. Крім того, TDK також забезпечує джерела живлення та енергетичні пристрої, магнітні головки та інші продукти.Його бренди продуктів включають TDK, EPCOS, Invensense, Micronas, Tronics та TDK-Lambda.
Внутрішня блок-схема MPU-6050
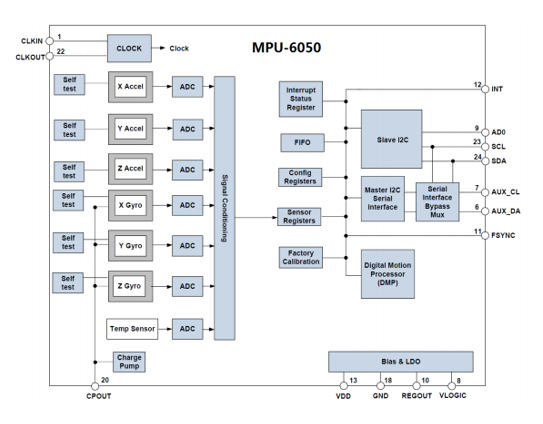
Серед них SCL та SDA-IIC інтерфейси, пов'язані з MCU, і MCU контролює MPU-6050 через цей IIC-інтерфейс.Також є інтерфейс IIC, а саме AUX_CL та AUX_DA.Цей інтерфейс може бути використаний для підключення зовнішніх підлеглих пристроїв, таких як магнітні датчики, для формування датчика дев'яти осі.Vlogic - це напруга порту IO.Цей PIN -код може підтримувати мінімум 1,8 В.Зазвичай ми підключаємо його безпосередньо до VDD.AD0 - штифт керування адресою рабського інтерфейсу IIC (підключений до MCU).Цей PIN -код контролює найнижчий біт IIC -адреси.Якщо він підключений до GND, IIC-адреса MPU-6050 становить 0x68;Якщо він підключений до VDD, це 0x69.Зверніть увагу, що адреса тут не включає найнижчий біт передачі даних (найнижчий біт використовується для представлення операцій зчитування та запису).На MWBALANDSTC15 AD0 підключений до GND, тому IIC-адреса MPU-6050 становить 0x68 (за винятком найнижчого бета).
Ініціалізуйте інтерфейс IIC
MPU-6050 використовує IIC для спілкування зі STC15, тому нам потрібно спочатку ініціалізувати лінії даних SDA та SCL, підключені до MPU-6050.
Скинути MPU-6050
Цей крок відновлює всі регістри всередині MPU-6050 до їх значень за замовчуванням, що досягається шляхом написання 1 на біт 7 реєстру управління живленням 1 (0x6b).Після скидання регістр управління живленням 1 буде відновлений до значення за замовчуванням (0x40), і цей регістр згодом повинен бути встановлений на 0x00, щоб розбудити MPU-6050 і поставити його у звичайний робочий стан.
Встановіть повномасштабний діапазон датчика кутової швидкості (Gyro) та датчика прискорення
На цьому кроці ми встановлюємо повномасштабний діапазон (FSR) двох датчиків через регістр конфігурації гіроскопа (0x1b) та регістр конфігурації датчика прискорення (0x1c) відповідно.Як правило, ми встановлюємо повномасштабний діапазон гіроскопа до ± 2000 дпс та повномасштабного діапазону акселерометра до ± 2G.
Встановіть інші параметри
Тут нам також потрібно налаштувати такі параметри: вимкніть переривки, вимкніть інтерфейс AUX I2C, вимкніть FIFO, встановіть швидкість вибірки гіроскопа та налаштуйте цифровий фільтр з низьким вмістом прохідного періоду (DLPF).Оскільки ми не використовуємо переривання для читання даних у цій главі, функцію переривання потрібно вимкнути.У той же час, оскільки ми не використовуємо інтерфейс AUX I2C для підключення інших зовнішніх датчиків, нам також потрібно закрити цей інтерфейс.Ці функції можна керувати через регістр entive inblect (0x38) та регістр управління користувачами (0x6a).MPU-6050 може використовувати FIFO для зберігання даних датчиків, але ми не використовували їх у цій главі, тому всі канали FIFO потрібно закрити.Це можна керувати через реєстр FIFO Enable (0x23).За замовчуванням значення цього реєстру становить 0 (тобто FIFO відключено), тому ми можемо використовувати значення за замовчуванням безпосередньо.Швидкість відбору проб гіроскопа контролюється реєстром подільника вибірки (0x19).Зазвичай ми встановлюємо цю швидкість вибірки на 50. Конфігурація цифрового фільтра з низьким пропуском (DLPF) завершується через регістр конфігурації (0x1a).Взагалі кажучи, ми встановимо DLPF на половину пропускної здатності, щоб збалансувати точність даних та швидкість відповіді.
Налаштуйте джерело системного годинника та ввімкніть датчик кутової швидкості та датчик прискорення
Налаштування джерела системного годинника залежить від регістра управління живленням 1 (0x6b), де найнижчі три біти цього реєстру визначають вибір джерела годинника.За замовчуванням ці три біти встановлюються на 0, а це означає, що система використовує внутрішній генератор RC 8 МГц як джерело годинника.Однак для підвищення точності годинника ми часто встановлюємо його на 1 і вибираємо PLL Gyroscope Gyroscope як джерела годинника.Крім того, дозволення датчика кутової швидкості та датчика прискорення також є важливим кроком у процесі ініціалізації.Обидві операції реалізуються через регістр управління живленням 2 (0x6c).Просто встановіть відповідний біт на 0, щоб активувати відповідний датчик.Після завершення вищезазначених кроків MPU-6050 може ввести нормальний робочий стан.Ті регістри, які не є спеціально встановленими, приймуть попередньо встановлені значення за замовчуванням система.
Як працює MPU-6050?
Датчик гіроскоп
Датчик оснащений гіроскопом всередині, який завжди залишатиметься паралельним початковому напрямку через гіроскопічний ефект.Тому ми можемо обчислити напрямок і кут обертання, виявляючи відхилення гіроскопа з початкового напрямку.
Датчик акселерометра
Датчик акселерометра - це пристрій, який може виміряти прискорення, і він працює на основі принципу п'єзоелектричного ефекту.Під час прискорення датчик вимірює інерційну силу, застосовану до масового блоку, а потім обчислює значення прискорення за допомогою другого закону Ньютона.
Цифровий процесор руху (DMP)
DMP-це модуль обробки даних у мікросхемі MPU6050, який має вбудований алгоритм фільтрації Kalman для отримання даних з датчиків гіроскопа та акселерометра та обробки вихідних кватерніонів.Ця функція значно знижує навантаження периферичного мікропроцесора та уникає стомлюючої фільтрації та процесу злиття даних.
Примітки:
Кватерніони: кватерніони - це прості числа суперкомплексу.Складні числа складаються з реальних чисел плюс уявного одиниці I, де i^2 = -1.
Де використовується MPU-6050?
• Іграшки
• телефон та портативні ігри
• Контролери ігор на основі руху
• Технологія Blurfree ™ (для стабілізації відео/нерухомого зображення)
• Технологія AirSign ™ (для безпеки/аутентифікації)
• Розпізнавання жестів IG ™ IG ™
• Носимі датчики для здоров'я, фітнесу та спорту
• Рамка з підтримкою руху
• Технологія MotionCommand ™ (для коротких скорочень жестів)
• Послуги на основі місцезнаходження, цікаві місця та мертві рахунки
• 3D віддалені елементи керування для підключених до Інтернету DTV та встановлених коробки, 3D мишей
• Технологія Touchany Sweere ™ (для контролю/навігації програми "без дотику")/навігація)
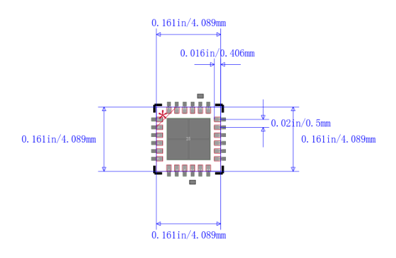
Пакет MPU-6050
Як зменшити шум MPU-6050?
Ми можемо прийняти такі способи зменшити шум MPU-6050:
Використовуйте калібровані датчики: калібрування акселерометра та гіроскоп MPU-6050 може усунути зміщення та похибку самих датчиків, тим самим зменшуючи ефект шуму.Процес калібрування зазвичай складається з двох етапів: статична калібрування та калібрування руху.
Процес фільтрації обладнання: Додавання фільтрувальних конденсаторів до лінії електропередачі MPU-6050 може зменшити вплив шуму живлення на датчик.Тим часом, під час компонування друкованої плати, ми повинні намагатися утримати MPU-6050 подалі від потенційних джерел перешкод, таких як високочастотні сигнальні лінії та компоненти високої потужності.
Обробка фільтрації програмного забезпечення: Після збору необроблених даних з MPU-6050 ми можемо додати посилання на фільтрацію програмного забезпечення для попереднього процесу початкових даних для усунення перешкод, спричинених шумом.Загально використовувані методи фільтрації програмного забезпечення включають середню фільтрацію, середину фільтрацію, фільтрацію Калмана тощо.
Використовуйте внутрішній фільтр з низьким пропуском: MPU-6050 має внутрішній інтегрований цифровий фільтр з низьким пропуском, який може бути використаний для зменшення високочастотного шуму, встановивши свою частоту відсічення.Зокрема, ми можемо встановити частоту відсічення цифрового фільтра, змінивши конфігураційний регістр MPU-6050 для усунення високочастотного шуму, спричиненого вибірковою пробкою.
Розрахунок траєкторії руху на основі MPU-6050
MPU-6050-це шестикусний акселерометр та датчик гіроскопа, який можна використовувати для вимірювання руху та ставлення об'єктів.Розрахунок траєкторії руху на основі MPU-6050 може бути реалізований наступними кроками:
Перший крок - прочитати дані датчиків.Нам потрібно прочитати дані акселерометра та гіроскоп із датчиків MPU-6050, використовуючи відповідні драйвери та бібліотечні функції.Ці дані зазвичай виводяться в цифровому форматі, тому для перетворення їх у фактичні вимірювання у фізичних одиницях необхідні деякі роботи з перетворення та калібрування.
Другий крок - обчислення прискорення.По -перше, нам потрібно обробити дані з акселерометра для отримання прискорення об'єкта на кожній осі.Згодом для обчислення швидкості та зміщення об'єкта на кожній осі нам потрібно інтегрувати дані про прискорення.Числові методи інтеграції, такі як метод Ейлера або метод Лунгер-Кутта, часто використовуються в цьому процесі для забезпечення точності обчислень переміщення.
Третій крок - обчислення кутової швидкості.Використовуючи дані гіроскопа, можна обчислити кутову швидкість об'єкта в кожній осі.Знову ж таки, ці дані потрібно відкалібрувати та перетворити для отримання кутової швидкості у фактичних фізичних одиницях.
Четвертий крок - обчислення обертання.Інтегруючи дані кутової швидкості, можна обчислити кут обертання об'єкта в кожній осі.Це можна зробити за допомогою чисельних методів інтеграції, таких як метод Ейлера або метод Лонге-Кутта для обчислення кута.
П'ятий крок - об'єднати дані.Ми поєднуємо дані з акселерометрів та гіроскопів, щоб отримати повне ставлення та інформацію про положення об'єкта.Це можна зробити за допомогою таких алгоритмів, як розв'язувач ставлення на основі кватерніону або розчинник кута Ейлера.
Шостий крок - візуалізувати результати.Ми перетворюємо обчислювану траєкторію руху об'єкта в набір точок у системі 3D -координат та відображати її за допомогою відповідних інструментів візуалізації для більш інтуїтивного розуміння траєкторії руху об'єкта та змін ставлення.
Часті запитання [FAQ]
1. Наскільки точний MPU6050?
Набуті результати показали достатню точність менше 1 % та надійність, забезпечуючи належне вимір валу ліфта та високі стандарти підйомної промисловості.
2. Як читати дані з MPU6050?
Щоб прочитати внутрішні регістри MPU6050, майстер надсилає початок умову з подальшою адресою рабів I2C та бітом запису, а потім адресою реєстру, яка буде прочитати.
3. Де використовується MPU6050?
У носійних відстеженнях для здоров'я пристроїв відстеження фітнесу.У безпілотниках та квадрокоптерах MPU6050 використовується для управління положенням.Використовується для контролю робототехнічної руки.Пристрої управління жестом рук.
4. Чи є MPU6050 - ІМУ?
Блок датчика IMU MPU6050 зчитує дані з датчика MPU-6050, який підключений до обладнання.Блок виводить прискорення, кутову швидкість та температуру вздовж осей датчика.
5. Яка обробка MPU6050?
Це бортовий процесор MPU6050, який поєднує дані, що надходять з акселерометра та гіроскопа.DMP - це ключ до використання MPU6050 і детально пояснюється пізніше.Як і у всіх мікропроцесорів, DMP потребує прошивки для запуску.
Про нас
ALLELCO LIMITED
Дізнайтеся більше
Швидкий запит
Будь ласка, надішліть запит, ми відповімо негайно.

Поглиблений посібник з LM317: Розуміння регульованих регуляторів напруги
на 2024/09/3
Розуміння TL431: Вичерпний посібник з регуляторів точних шунтів
на 2024/09/3
Популярні публікації
-
Що таке GND в ланцюзі?
на 1970/01/1 3108
-

Посібник з роз'єму RJ-45: кольорові коди роз'єму RJ-45, схеми електропроводки, програми R-J45, DJ-45
на 1970/01/1 2672
-
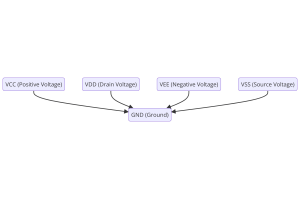
Розуміння напруг живлення в електроніці VCC, VDD, VEE, VSS та GND
на 0400/11/15 2211
-

Типи з'єднувачів волокон: SC проти LC та LC проти MTP
на 1970/01/1 2182
-

Порівняння між DB9 та RS232
на 1970/01/1 1802
-

Що таке акумулятор LR44?
Електрика, ця всюдисуща сила, тихо пронизує кожен аспект нашого повсякденного життя, від тривіальних гаджетів до небезпечного для життя медичного обладнання, вона відіграє мовчазну роль.Однак по -справжньому розумінн...на 1970/01/1 1774
-
Розуміння основи: індуктивність та активність
У складному танці електротехніки тріо основних елементів займає центральну сцену: індуктивність, опір та ємність.Кожен несе унікальні риси, які диктують динамічні ритми електронних схем.Тут ми вирушаємо в подорож, що...на 1970/01/1 1728
-

CR2430 Вичерпний посібник з акумулятора: Технічні характеристики, програми та порівняння з батареями CR2032
Що таке акумулятор CR2430?Переваги акумуляторів CR2430НормаCR2430 Застосування акумулятораCR2430 еквівалентCR2430 проти CR2032Батарея CR2430 РозмірЩо шукати, купуючи CR2430 та еквівалентиАркуш даних pdfЧасті запитання Акумулятори - це серц...на 1970/01/1 1673
-
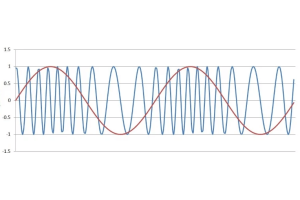
Що таке РФ і чому ми його використовуємо?
Технологія радіочастоти (RF) є ключовою частиною сучасного бездротового зв'язку, що дозволяє передавати дані на великі відстані без фізичних з'єднань.Ця стаття заглиблюється в основи РФ, пояснюючи, як електромагнітне в...на 1970/01/1 1670
-
Вичерпний посібник з HFE в транзисторах
Транзистори є вирішальними компонентами в сучасних електронних пристроях, що дозволяє посилити та керувати сигналами.Ця стаття заглиблюється в знання, що стосуються HFE, включаючи те, як вибрати значення HFE транзистора...на 5600/11/15 1632
Номер гарячої частини
-

NTTFS4C10NTAG
onsemi
MOSFET N-CH 30V 8.2A/44A 8WDFN
ISO6720BDR
Texas Instruments
GENERAL PURPOSE DUAL-CHANNEL, 2/
HIP9011ABZT
Renesas Electronics America Inc
IC SENSOR ENGINE KNOCK 20-SOIC
ADC08351CIMTCX
Texas Instruments
IC ADC 8BIT 20TSSOP
SKY13418-485LF
Skyworks Solutions Inc.
IC RF SWITCH SP8T 3GHZ 14QFN
MAX6138CEXR12+T
Analog Devices Inc./Maxim Integrated
IC VREF SHUNT 0.5% SC70-3
RT0402DRD072K49L
YAGEO
RES SMD 2.49KOHM 0.5% 1/16W 0402
CC0805KRX7R9BB393
YAGEO
CAP CER 0.039UF 50V X7R 0805
LM5022MMX
Texas Instruments
IC REG CTRLR BOOST/SEPIC 10MSOP
LIS2DS12TR
STMicroelectronics
ACCEL 2-16G I2C/SPI 12LGA
SN7406N
Texas Instruments
IC INV OPEN COL 6CH 1-IN 14DIP
SPC582B60E1CD00X
STMicroelectronics
IC MCU 32BIT 1MB FLASH 64ETQFP
SP-2U1+
Mini-Circuits
RF PWR DVDR 2.3-2.5GHZ SOT23-6
AT89C55WD-24PU
Microchip Technology
IC MCU 8BIT 20KB FLASH 40DIP
EC3B15
Cincon Electronics Co. LTD
DC DC CONVERTER +/-15V 7.5W
SN74CBT3861DWR
Texas Instruments
IC BUS SWITCH 10 X 1:1 24SOIC
NL17SH04P5T5G
onsemi
IC INVERTER 1CH 1-INP SOT953
AD712JR-REEL
Analog Devices Inc.
IC OPAMP JFET 2 CIRCUIT 8SOIC -

PTH08T250WAD
Texas Instruments
DC DC CONVERTER 0.7-3.6V
BCM88676CB0KFSBG
Broadcom Limited
DC ONLY
BC847BW
Taiwan Semiconductor Corporation
SOT-323, 50V, 0.1A, NPN BIPOLAR
GRM1555C1H470FA01D
Murata Electronics
CAP CER 47PF 50V C0G/NP0 0402
LTC2366IS6#TRPBF
Analog Devices Inc.
IC ADC 12BIT SAR TSOT23-6
X5043S8ZT1
Renesas Electronics America Inc
IC SUPERVISOR 1 CHANNEL 8SOIC
MAX6012AEUR-T
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.32% SOT23-3
P2100SBLRP
Littelfuse Inc.
THYRISTOR 180V 250A DO214AA
ADG444BRZ-REEL
Analog Devices Inc.
IC SWITCH SPST-NCX4 70OHM 16SOIC
RC0402FR-0732K4L
Yageo
RES SMD 32.4K OHM 1% 1/16W 0402
XRCGB27M120F3M10R0
Murata Electronics
CRYSTAL 27.1200MHZ 10PF SMD
ISL6413IR-TK
Renesas Electronics America Inc
IC REG TRPL BUCK/LNR SYNC 24QFN
V300B48T250BL
Vicor Corporation
DC DC CONVERTER 48V 250W
08051A330K4T2A
KYOCERA AVX
CAP CER 33PF 100V NP0 0805
TPS78833DBVT
Texas Instruments
IC REG LINEAR 3.3V 150MA SOT23-5
IS82C50A-5
Renesas Electronics America Inc
IC PERIPH UART/BRG 10MHZ 44-PLCC
500R07S220JV4T
Johanson Technology
CAP CER 22PF 50V C0G/NP0 0402
1210ZC335KAT2A
KYOCERA AVX
CAP CER 3.3UF 10V X7R 1210 -

LMH6321TSX
Texas Instruments
IC BUFFER 1 CIRC DDPAK/TO263-7
C3216X7R2A684K160AA
TDK Corporation
CAP CER 0.68UF 100V X7R 1206
06031C392KAT2A
AVX Corporation
CAP CER 3900PF 100V X7R 0603
MIC49500WR
Microchip Technology
IC REG LINEAR POS ADJ 5A SPAK-7
BZX84C16
Diotec Semiconductor
ZENER SOT-23 16V 0.3W 5%
MCP4231-103E/SL
Microchip Technology
IC DGTL POT 10KOHM 129TAP 14SOIC
AT24C32AN-10SI-2.7
Microchip Technology
IC EEPROM 32KBIT I2C 8SOIC
MAX8752ETA+T
Analog Devices Inc./Maxim Integrated
IC REG CONV TFT LCD 1OUT 8TDFN
MT29F32G08CBCCBH1-12Z:C
Micron Technology Inc.
IC FLASH 32GBIT PARALLEL 100VBGA
LF25ABDT-TR
STMicroelectronics
IC REG LINEAR 2.5V 500MA DPAK
74ALVCH16244ZRDR
Texas Instruments
IC BUFFER NON-INVERT 3.6V 54BGA
TPS2033DR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 8SOIC
ZXMC3A16DN8QTA
Diodes Incorporated
MOSFET BVDSS: 25V~30V SO-8 T&R 0
BC857BW
Yangjie Technology
SOT-323 PNP 0.2W -0.1A -50V Tran
W631GG6KB-11
Winbond Electronics
IC DRAM 1GBIT PAR 96WBGA
AD7916BRMZ
Analog Devices Inc.
IC ADC 16BIT SAR 10MSOP
R3730
Microchip Technology
STD RECTIFIER
AD9572ACPZPEC
Analog Devices Inc.
IC CLOCK GENERATOR 40LFCSP